درس 2: نسبتهای مثلثاتی برخی زوایا
حسابان (1)
یازدهم
متوسطه دوم نظری
علوم ریاضی
درسنامه آموزشی این مبحث
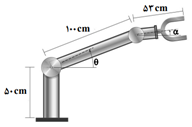
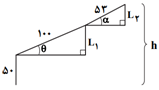
اگر ربات شكل روبهرو برای گرفتن يک شیء در ارتفاع $23/5cm$، مفصل دوم خود را در حالت $\alpha =-{{30}^{{}^\circ }}$ قرار داده باشد، زاويۀ $\theta $ در اين وضعیت چند درجه است؟ $(-\frac{\pi }{2}\lt \alpha \lt \frac{\pi }{2},0\le \theta \le \frac{\pi }{2})$
تحلیل ویدئویی تست

محتواهای آموزشی مشابه
فایل های پاورپوینت، ویدئو، صوتی، متنی و ...
پرسش و پاسخ های مشابه
سوال کنید یا به سوالات دیگران پاسخ دهید ...